Estimate transfer function models by Simple Refined Instrumental Variables method.
Source:R/armax.sriv.fit.R
armax.sriv.fit.RdCalibrate unit hydrograph transfer function models (armax or
expuh) using Simple Refined Instrumental Variables (SRIV)
method.
armax.sriv.fit(
DATA,
order = hydromad.getOption("order"),
delay = hydromad.getOption("delay"),
noise.order = hydromad.getOption("riv.noise.order"),
fixed.ar = NULL,
...,
fallback = TRUE,
na.action = na.pass,
epsilon = hydromad.getOption("sriv.epsilon"),
max.iterations = hydromad.getOption("sriv.iterations")
)Arguments
- DATA
a
ts-like object with named columns:- list("U")
observed input time series.
- list("Q")
observed output time series.
- order
the transfer function order. See
armax.- delay
delay (lag time / dead time) in number of time steps. If missing, this will be estimated from the cross correlation function.
- noise.order
placeholder
- fixed.ar
placeholder
- ...
further arguments may include
- prefilter
- initX
- trace
~~Describe
tracehere~~
- fallback
placeholder
- na.action
placeholder
- epsilon
placeholder
- max.iterations
placeholder (i.e. negative or imaginary poles) are detected.
Value
a tf object, which is a list with components
- coefficients
the fitted parameter values.
- fitted.values
the fitted values.
- residuals
the residuals.
- delay
the (possibly fitted) delay time.
Details
In normal usage, one would not call these functions directly, but rather
specify the routing fitting method for a hydromad model using
that function's rfit argument. E.g. to specify fitting an
expuh routing model by SRIV one could write
hydromad(..., routing = "expuh", rfit = "sriv")
which uses the default order, hydromad.getOption("order"), or
hydromad(..., routing = "expuh", rfit = list("sriv", order =
c(2,1))).
References
Young, P. C. (2008). The refined instrumental variable method. Journal Européen des Systèmes Automatisés 42 (2-3), 149-179. http://dx.doi.org/10.3166/jesa.42.149-179
Jakeman, A. J., G. A. Thomas and C. R. Dietrich (1991). System Identification and Validation for Output Prediction of a Dynamic Hydrologic Process, Journal of Forecasting 10, pp. 319--346.
Ljung, Lennart (1999). System Identification: Theory for the User (second edition). Prentice Hall. pp. 224-226, 466.
Examples
U <- ts(c(0, 0, 0, 1, rep(0, 30), 1, rep(0, 20)))
Y <- expuh.sim(lag(U, -1), tau_s = 10, tau_q = 2, v_s = 0.5, v_3 = 0.1)
set.seed(0)
Yh <- Y * rnorm(Y, mean = 1, sd = 0.2)
fit1 <- armax.sriv.fit(ts.union(U = U, Q = Yh),
order = c(2, 2), warmup = 0
)
fit1
#>
#> Unit Hydrograph / Linear Transfer Function
#>
#> Call:
#> armax.sriv.fit(DATA = ts.union(U = U, Q = Yh), order = c(2, 2),
#> warmup = 0)
#>
#> Order: (n=2, m=2) Delay: 1
#> ARMAX Parameters:
#> a_1 a_2 b_0 b_1 b_2
#> 1.145551 -0.244799 0.350852 -0.240868 -0.007109
#> Exponential component parameters:
#> tau_s tau_q v_s v_q v_3
#> 6.69975 0.79487 0.66335 0.40223 -0.02904
#> TF Structure: S + Q + inst. (three in parallel)
#> Poles:0.2842, 0.8613
#>
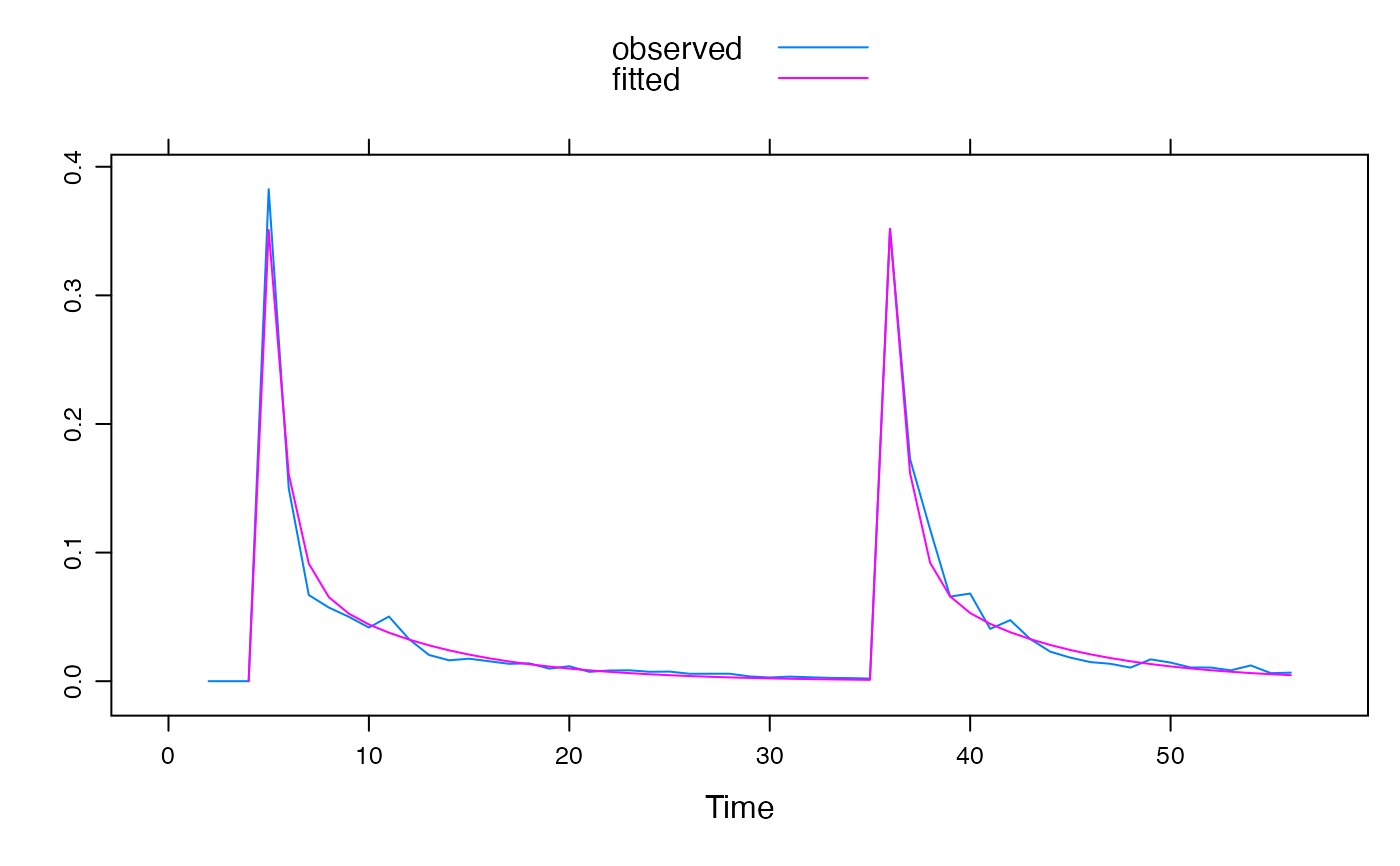
xyplot(ts.union(observed = Yh, fitted = fitted(fit1)),
superpose = TRUE
)