Use cross-correlation to estimate the delay between an input time series and (rises in) the corresponding output time series.
estimateDelay(
DATA = data.frame(U = , Q = ),
rises = TRUE,
lag.max = hydromad.getOption("max.delay"),
n.estimates = 1,
negative.ok = FALSE,
na.action = na.exclude,
plot = FALSE,
main = NULL,
...
)Arguments
- DATA
a
ts-like object with named components:- list("U")
input (forcing) time series.
- list("Q")
output (response) time series.
- rises
use only rises in the output to estimate delay.
- lag.max
largest delay (in time steps) to consider.
- n.estimates
number of estimates of delay to produce.
- negative.ok
to allow negative delay times to be considered.
- na.action
handler for missing values. The default removes leading and trailing NAs only. Use
na.excludeto remove all NAs, but the result will not be a valid autocorrelation sequence.- plot
plot the cross-correlation function.
- main
title for plot.
- ...
Value
The estimated delay as an integer number of time steps. If
n.estimates > 1, that number of integer delays, ordered by the CCF.
Details
The estimated delay is the one maximising the cross-correlation function.
See also
Examples
set.seed(1)
x <- ts(pmax(0, rgamma(200, shape = 0.1, scale = 20) - 5))
## simulate error as multiplicative uniform random
y <- x * runif(200, min = 0.5, max = 1.5)
## and resample 10 percent of time steps
ii <- sample(seq_along(y), 20)
y[ii] <- rev(y[ii])
## apply recursive filter and lag
y <- filter(y, 0.8, method = "r")
y <- lag(y, -2) # true delay is 2
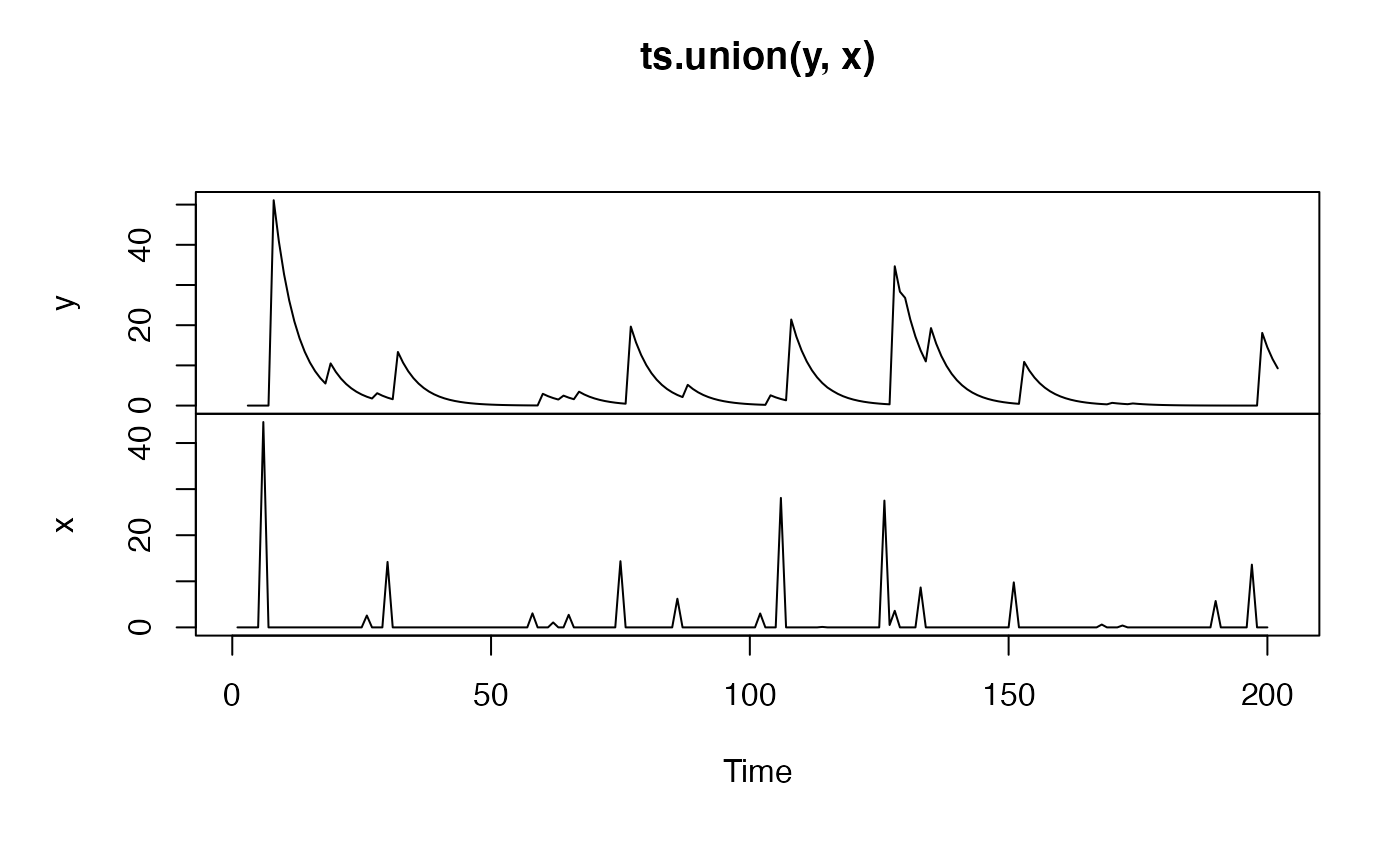
plot(ts.union(y, x))
 ## based on cross correlation function:
estimateDelay(ts.union(y, x), rises = FALSE, plot = TRUE)
## based on cross correlation function:
estimateDelay(ts.union(y, x), rises = FALSE, plot = TRUE)
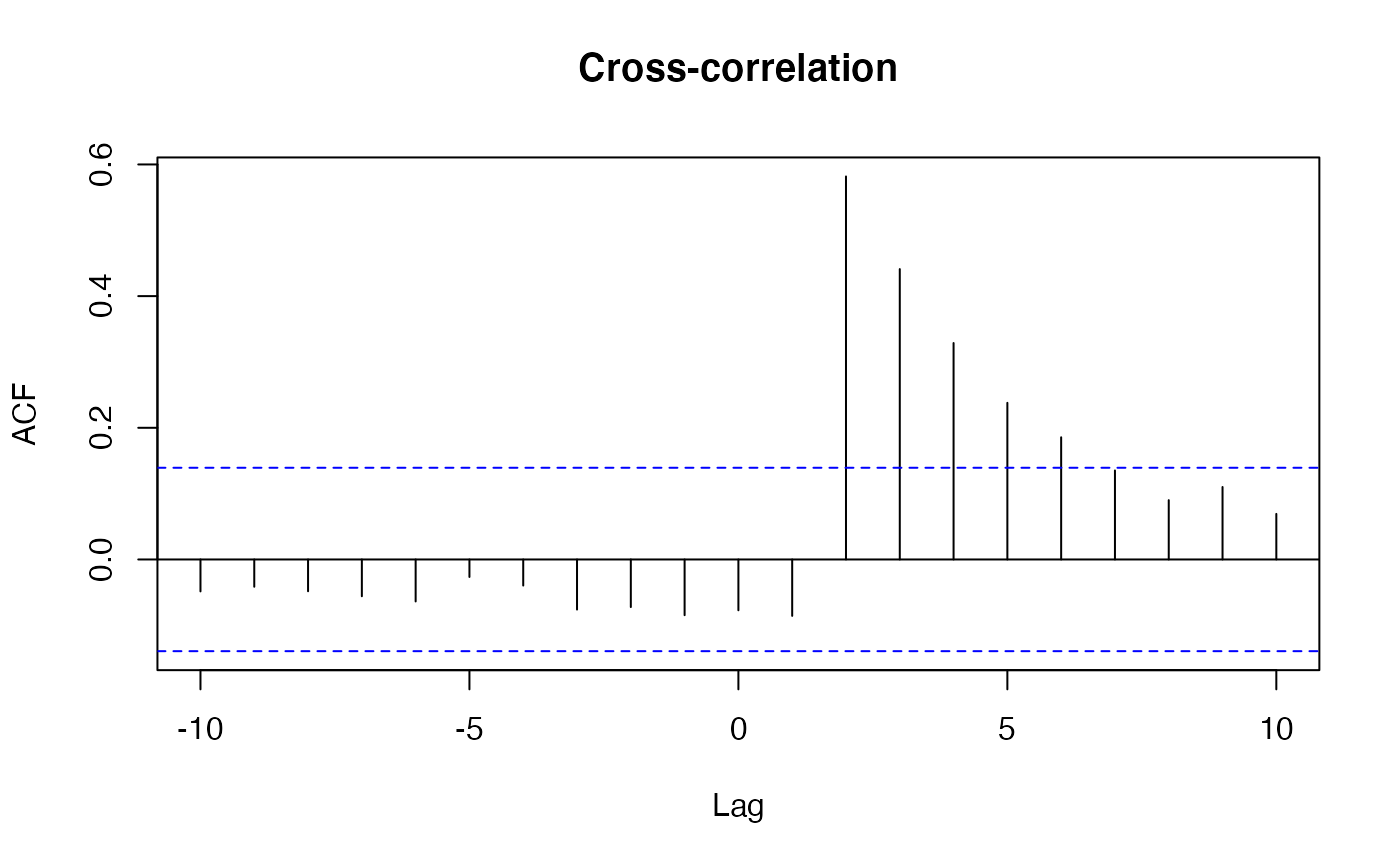 #> [1] 2
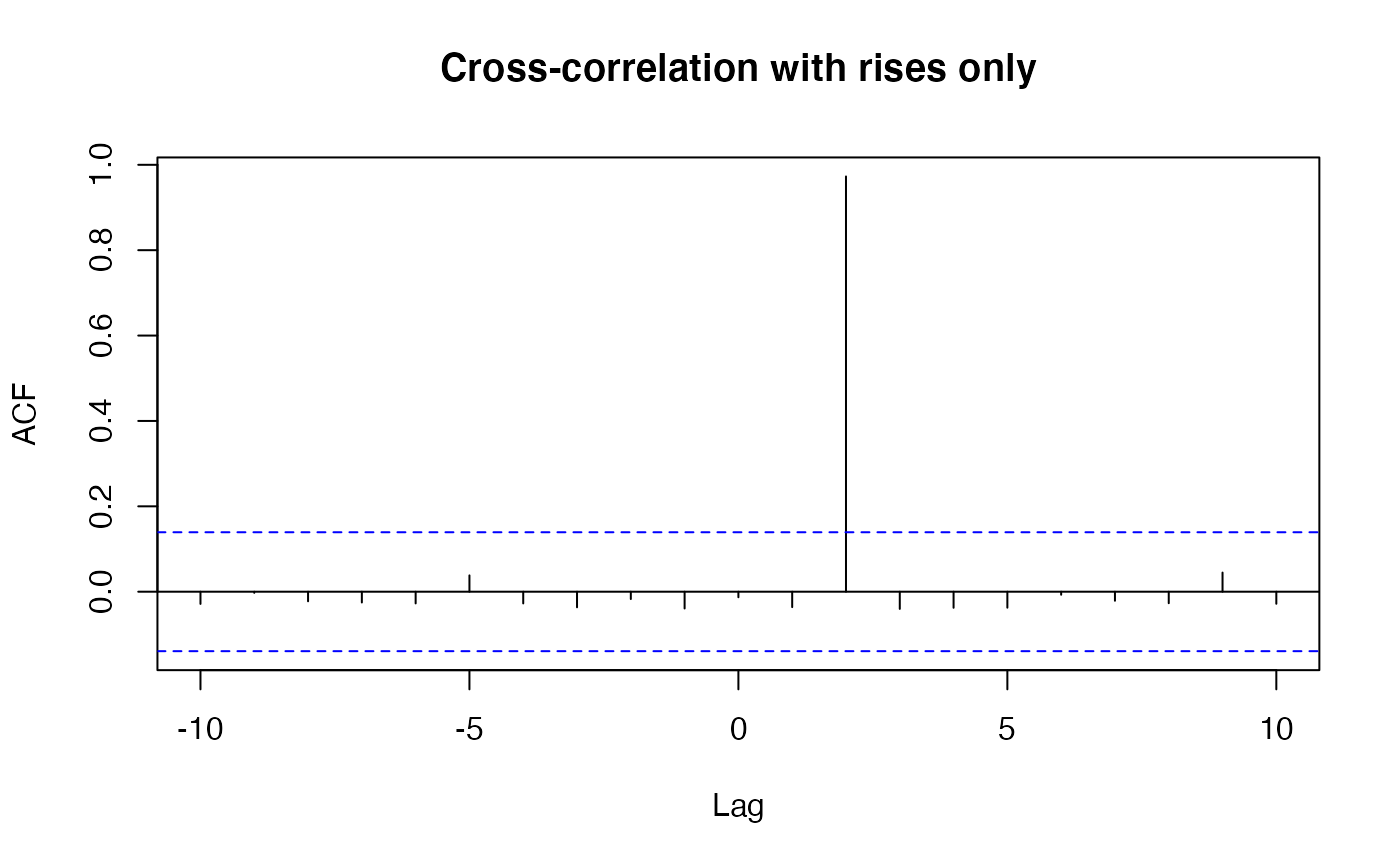
## based on ccf with flow rises only:
estimateDelay(ts.union(y, x), plot = TRUE)
#> [1] 2
## based on ccf with flow rises only:
estimateDelay(ts.union(y, x), plot = TRUE)
 #> [1] 2
#> [1] 2